Stepper Motor Basics & Working Principle
Stepper motor basics
What is a stepper motor? Stepper motor is an actuator transforming electric pulse into angular displacement. Popularly, when receiving a pulse signal, the stepper motor will rotate a fixed angle (namely"stepping angle") according to the direction set for the stepper motor. The angular displacement volume can be controlled by controlling the pulse number to achieve the purpose of positioning accurately. In the meantime, the rotational velocity and acceleration of motor can be controlled by controlling the pulse frequency to achieve the purpose of speed control.
 Stepper motor working principle
Stepper motor working principle
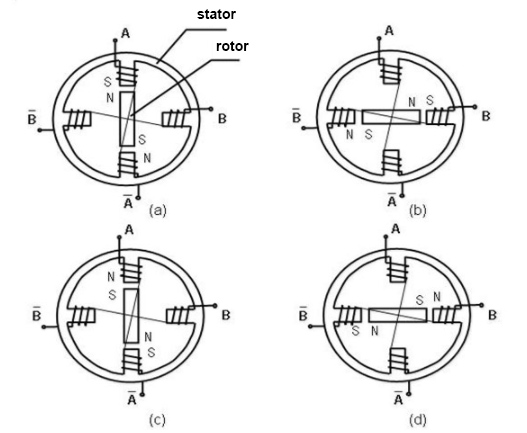
How does a stepper motor work? The stepper motor rotor is a permanent magnet, when the current flows through the stator winding, the stator winding to produce a vector magnetic field. The magnetic field drives the rotor to rotate by an angle so that the pair of magnetic fields of the rotor and the magnetic field direction of the stator are consistent. When the stator's vector magnetic field is rotated by an angle, the rotor also rotates with the magnetic field at an angle. Each time an electrical pulse is input, the motor rotates one degree further. The angular displacement it outputs is proportional to the number of pulses input and the speed is proportional to the pulse frequency. Change the order of winding power, the motor will reverse. Therefore, it can control the rotation of the stepping motor by controlling the number of pulses, the frequency and the electrical sequence of each phase winding of the motor.
 Types of stepper motor
Types of stepper motor
Stepper motor is divided into three types: permanent magnet stepper motor (PM), variable reluctance stepper motor (VR) and hybrid stepper motor (HB).
- PM stepper motor is generally 2-phase, with small torque and volume; its stepping angle is generally 7.5° or 15°.
- VR stepper motor is generally 3-phase, high torque output can be realized; the stepping angle is generally 1.5, but the noise and vibration is large; the rotor magnetic circuit of VR stepper motor is made of soft magnetic materials. There is multi-phase exciting winding on the rotor. The torque is generated by taking advantage of the change in magnetic conductance.
- HB stepper motor, indicating mixing the advantages of PM and VR, is divided into 2-phase, 3-phase and 5-phase. The stepping angle of 2-phase is generally 1.8°, that of 3-phase 1.2° and that of 5-phase is 0.72°. It is mostly widely applied.
Stepper motor selection
- Stepping angle: It is necessary to select the stepping angle of motor according to the requirements of load precision. The least resolution ratio of the load is generally converted to the motor shaft, pay attention to the angle for each resolution ratio and the stepping angle of motor should be equal to or smaller than the angle.In general, the stepping angle of 2-phase motor is 0.9°/1.8°, that of 3-phase is 1.2° and that of 5-phase is 0.36°/0.72°. ATO 2 phase stepper motor is 1.8 degree step angle, and 3 phase stepper motor is 1.2 degree step angle.
- Static torque: Select the static torque according to the load of motor while load can be divided into inertia and friction load. When directly starting the motor (generally from the low to high velocity), give considerations into the two kinds of load. When starting the motor at acceleration, give considerations into the inertia load; when the motor rotates at constant velocity, only give considerations into the friction load. Generally, the static torque shall be within 2-3 times of the friction load.
- Current: As for the motor s with the same static torque, there is great difference in their motion characteristics due to the difference in current parameters. The current of current can be judged according to the torque frequency characteristic curve diagram.
If you are looking for a Nema 17 stepper motor, Nema 23 stepper motor, Nema 34 stepper motor, ATO.com is best choice for you.
